



Crear una interfaz que permita controlar un robot desde cualquier parte del mundo usando gafas de realidad virtual, fue el reto que asumió Juan Pablo Rivera Arbeláez, estudiante de la Universidad Autónoma de Occidente.
Únete a nuestro canal de WhatsApp
En un innovador cruce entre la Universidad Autónoma de Occidente y el Nakama Robotics Lab, en la Universidad Twente, en Holanda, se ha dado un paso hacia el futuro dónde tareas de alta complejidad pueden realizarse sin exponer a las personas al riesgo.
Asimismo, el proyecto ha sido desarrollado en el Nakama Robotics Lab, en la Universidad Twente, en Holanda; en donde se combina el aprendizaje de datos y robótica para crear una plataforma que pueda colaborar con humanos en diversas tareas.

Conexión desde cualquier lugar del mundo
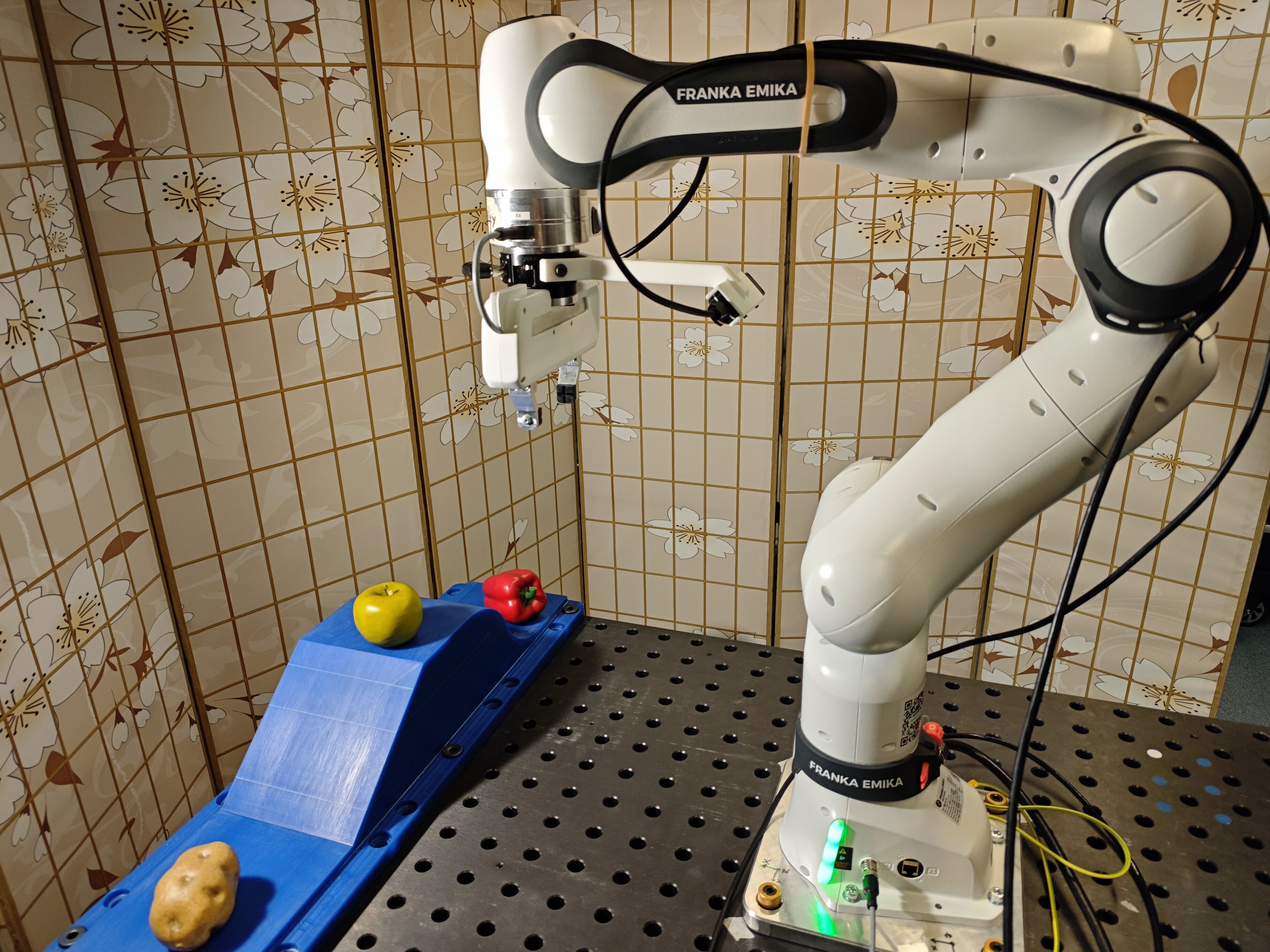
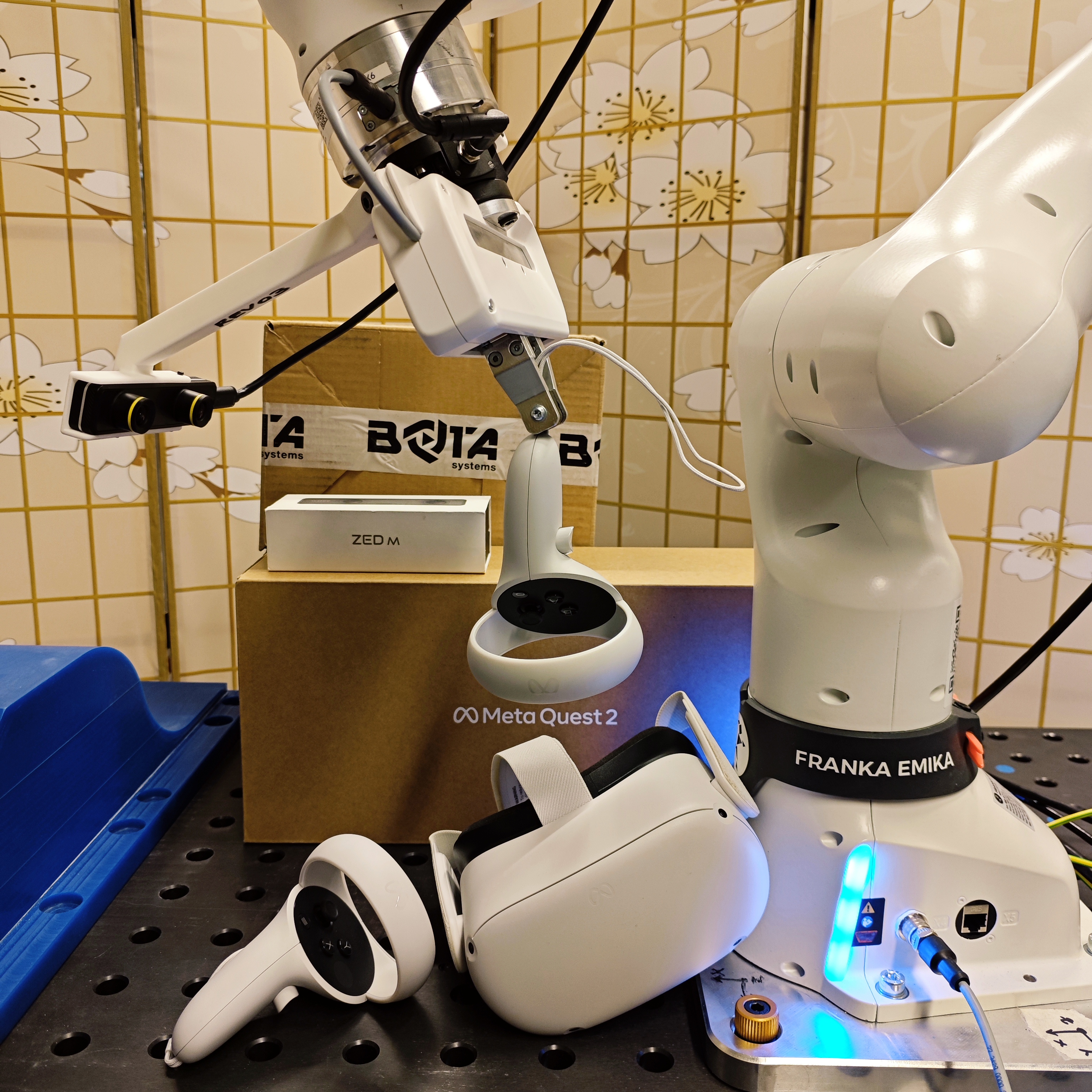
Por su parte, el proyecto liderado por el estudiante Juan Pablo Rivera junto a investigadores del laboratorio Nakama, permite controlar un brazo robótico a través de gafas de realidad virtual desde cualquier parte del mundo.
“Mi papel fue lograr construir una solución funcional y documentada a través de una interfaz integral, pensada no solo para la investigación de ese momento, sino que también sirviera como base para futuros proyectos”.
Comentó el estudiante
Interfaz inmersiva para explorar zonas de riesgo
Con el objetivo de disminuir riesgos en ciertos lugares en los que las personas deben realizar múltiples trabajos, se creó una interfaz de teleoperación que permite dirigir las acciones de un robot sin importar la distancia, permitiendo que el usuario vea en primera persona lo que percibe el robot y lo maneje con total precisión.
Así pues, este tipo de tecnología puede tener aplicaciones inmediatas en entornos de construcción, zonas de desastre, exploración industrial, medicina remota e incluso en minería.
Por lo que, el equipo busca que su sistema sea una herramienta de teleoperación práctica y accesible, que permita a personas operar robots con seguridad, sin exponerse a ambientes hostiles.
Le puede interesar: Rescatan una boa de más de dos metros en una zona urbana de Medellín
Además, representa un avance hacia la descentralización de tareas peligrosas, ya que operadores podrían controlar robots transmisibles a lugares remotos o inaccesibles, resguardando su integridad física.
En definitiva, este avance muestra cómo la sinergia entre tecnología y colaboración internacional puede avanzar en el camino para una nueva generación de interfaces humano–robot seguras y escalables.
Artículo relacionado

Sigue nuestras redes sociales: